Attitude & Heading Reference System (AHRS)
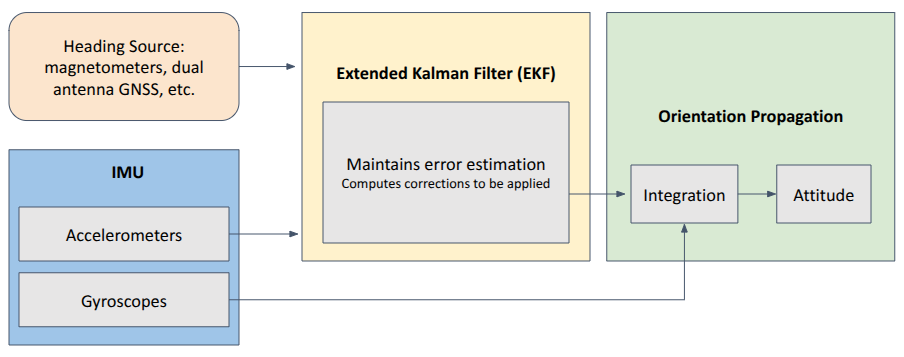
An Attitude and Heading Reference System (AHRS) is a sensor assembly that pairs an IMU with an additional sensor—commonly a magnetometer—to determine heading. It uses gravity as a vertical reference to stabilize the IMU, merging data from the gyroscopes with the accelerometer’s gravity readings in a Kalman filter to calculate roll and pitch. For heading, an auxiliary sensor such as a magnetometer or a dual-antenna GNSS is used. While an AHRS can provide precise roll, pitch, and yaw data under low to moderate dynamic conditions and is straightforward to set up and operate, its overall accuracy might be compromised in highly dynamic environments or areas with significant magnetic disturbances.