Ubuntu 22.04 with ROS 2 Humble and Ubuntu 24.04 with ROS 2 Jazzy are both fully supported by Olive Robotics components, ensuring smooth integration and optimal performance across both LTS platforms. Whether using IMUs, AI-powered camera sensors, or EdgeROS drivers, all Olive Robotics hardware and software modules operate flawlessly on these distributions. The ROS 2 native design of the components guarantees plug-and-play compatibility, and key features such as real-time data streaming, sensor fusion, and neural network inference are thoroughly tested and stable on both setups. This flexibility allows developers and roboticists to choose the distribution that best fits their project timeline or ecosystem without compromising on reliability or performance.
ROS 2 Humble is preinstalled and working in all Olive Components as default, but if you need to activate ROS 2 Jazzy and use Ubuntu 24.04 please follow this steps:
🚀 Installing the Jazzy Build for Olive Components #
Follow these steps to install and activate the Jazzy ROS 2 distro on your Olive Component:
1. Download the Latest Software Patch and Jazzy Build #
a. Make sure you are using the latest software patch (Patch > 1787)
https://olive-robotics.com/docs2/patch-update/
b. Download the prebuilt Jazzy package from the Olive Robotics website:
wget https://olive-robotics.com/uploads/patch/jazzy.zip2. Upload to Olive Component #
Transfer the file to your Olive Component over SCP:
scp jazzy.zip olive@192.168.7.100:3. SSH into the Device #
Access your device via SSH (password is one):
ssh olive@192.168.7.1004. Extract and Install #
Unzip and move the Jazzy distribution to the ROS 2 directory:
unzip jazzy.zip
sudo mv jazzy /opt/ros2/
rm jazzy.zip5. Restart the Device #
Reboot or restart the Olive Component to apply changes:
sudo reboot6. Activate Jazzy in the GUI #
- Open the GUI for Olive Component.
- In the Distro dropdown menu, select Jazzy.
- Click Save All in All Settings.
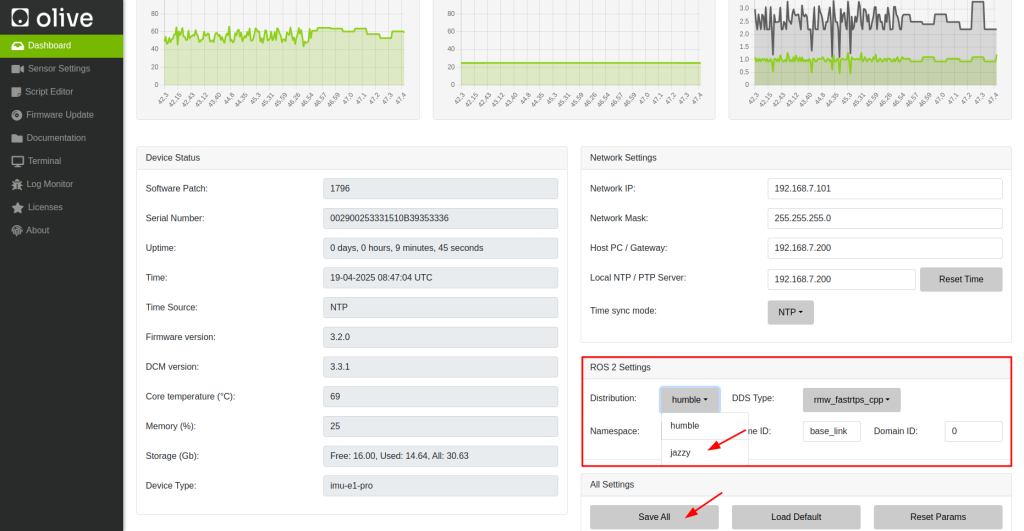
The device will reboot once again to finalize the switch. After reboot, the IMU will start publishing using the native Jazzy distro.
