Inertial Navigation System (INS)
An Inertial Navigation System (INS) is a device that relies on a triad of gyroscopes and accelerometers to compute a 6 degrees of freedom navigation output (orientation, velocity and position).
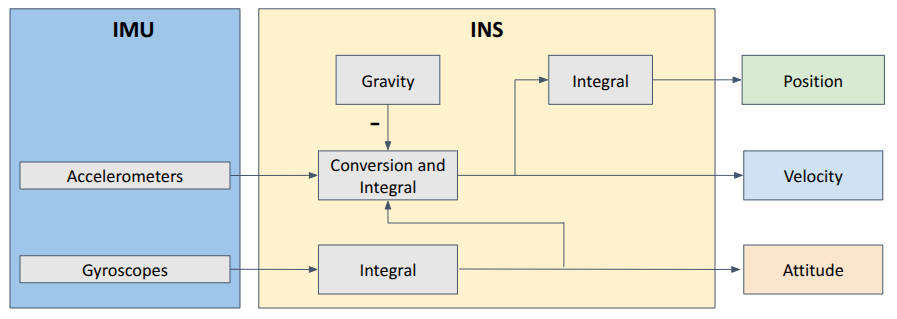
The INS is highly efficient for short term navigation. As the sensors are integrated over time, there is a residual error that tends to increase. Therefore, corrections must be regularly applied on the INS outputs to keep reasonable errors.
