Why is ROS so important?
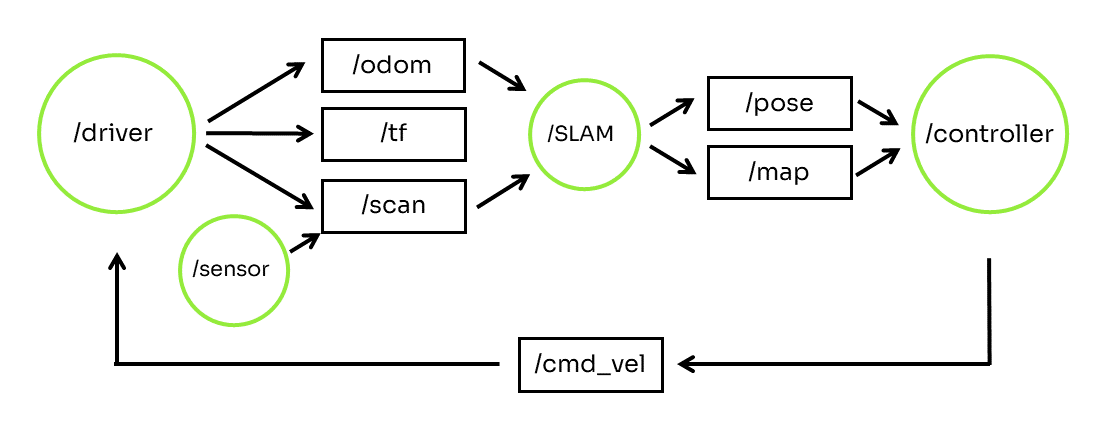
Robots are networks of networks, with sensors capturing data, passing to compute technologies, and then on to actuators and back again in a deterministic manner. These networks can be understood as the nervous system of the robot, passing across compute Nodes, that represent neurons. Like the human nervous systems, real-time information across all these computational Nodes is fundamental for the robot to behave coherently.
"Robot brains" are built with this same philosophy. Behaviors take the form of computational graphs, with data flowing between Nodes, across physical networks (communication buses) and while mapping to underlying sensors, compute technologies and actuators. ROS enables you to build these computational graphs and create robot behaviors by providing libraries, a communication infrastructure, drivers and tools to put it all together.