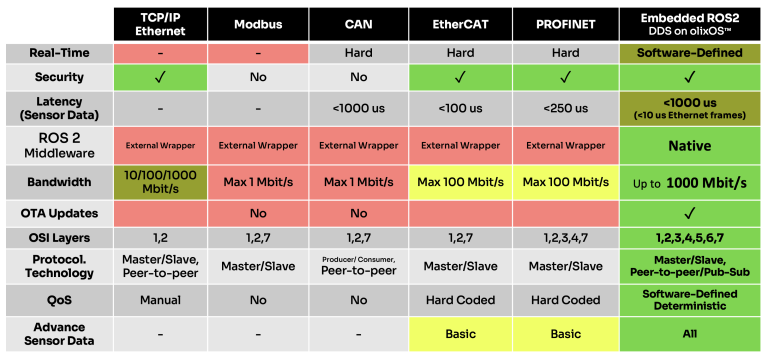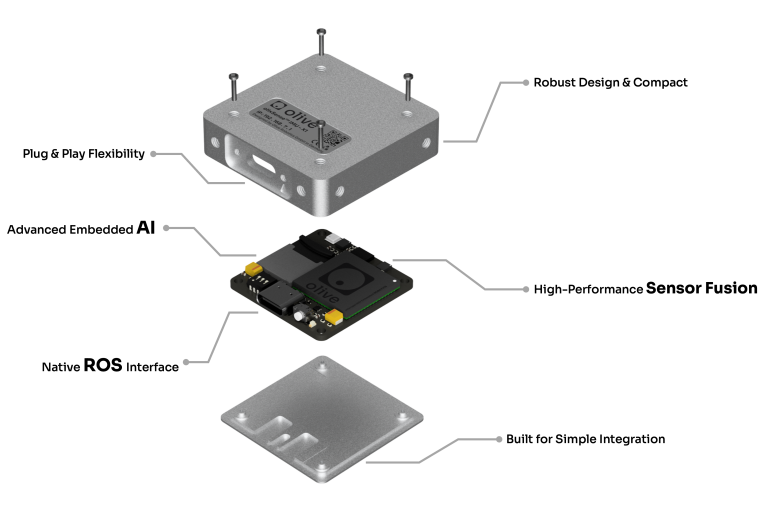
olixSense X1 is powered by DDS, ROS-certified Data Distribution Service (DDS) implementation designed specifically for advance robotics and embedded applications. DDS is interoperable with Fast DDS, and Cyclone DDS, the two native middleware powering ROS 2. This makes X1 plug-and-play with ROS 2 using its ethernet interface over USB connection, streaming seamlessly to ROS 2 nodes on the host controller without requiring any additional installation. Experience 10X higher ODR with ultra-fast, real-time data streaming in native ROS message format over DDS. Achieve industry-leading performance with less than 1ms latency, ensuring seamless integration for advanced robotics applications.