¹ Scope and Precedence. This notice governs all statements, specifications, images, performance figures, CAD/STEP drawings, SDKs, binaries, and downloadable materials referring to any olixSense™ unit (including but not limited to X1, X1 Pro, and X1 Ultra). In the event of inconsistency, the latest signed commercial agreement or Olive Robotics GmbH (“Olive”) published technical bulletin shall prevail. Materials may be revised, replaced, or withdrawn at Olive’s discretion without prior notice.
² Informational Nature; No Warranted Characteristics. Datasheets, user guides, ROS 2 topic maps, latency/jitter figures, accuracy tables, and benchmark graphics are provided solely for orientation and planning. They do not constitute an assurance of properties, a guarantee, or a durability warranty, and are expressly subject to deviation under field conditions, including but not limited to host design, mounting geometry, EMI/EMC exposure, thermal cycling, supply quality, and middleware stack variation. See also Olive’s technical document series for X1 Pro (rev. V0.1) which characterizes features and publishes a non-warranty disclaimer.
³ Validation Regime. Unless stated otherwise, all performance claims (e.g., output-data-rate ranges, fusion ODR ceilings, sub-ms time-sync, orientation RMS) are measured on internal rigs under controlled conditions using standardized robotics workloads (e.g., UAV stabilization, AMR trajectory tracking). Replication by third parties requires equivalent instrumentation, calibration procedures, excitation profiles, and environmental controls; otherwise, divergence is expected.
⁴ Series Variants and Configuration Dependence. Capabilities may differ among X1, X1 Pro, and X1 Ultra (e.g., number of redundant MEMS arrays, magnetometer inclusion, thermal envelope, power draw, maximum filtered ODR, or olixAI™ model class). Any feature labeling “typical,” “up to,” “~,” or “<” denotes indicative, configuration-dependent values and shall not be interpreted as a unilateral promise of performance.
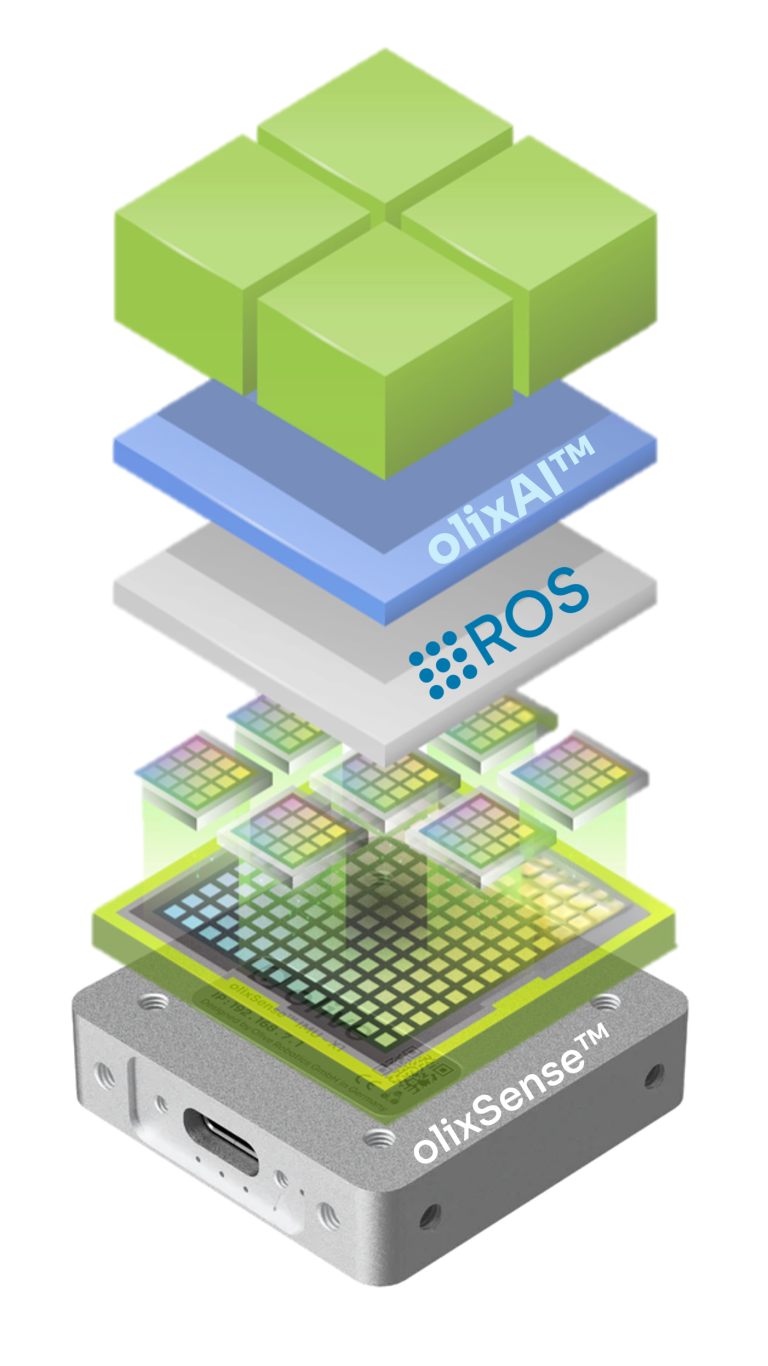
⁵ Software Stack; Licensing. olixOS™ (real-time Linux kernel adaptations), olixAI™ embedded fusion models, bootloaders, and control-panel software are licensed, not sold. They may include FOSS components subject to their respective licenses; compliance with such licenses is the integrator’s responsibility. Reverse engineering, decompilation, or circumvention of signature checks or secure-boot policies is prohibited except to the extent mandatorily permitted by law. Olive may condition feature access (including advanced fusion modes) on version alignment and/or license activation.
⁶ Firmware, Models, and Updates. OTA or tethered updates (e.g., over Ethernet-over-USB) may modify timing, fusion strategies, security posture, or driver interfaces and can enable/disable features for integrity or safety reasons. Olive reserves rollback rights and may impose cryptographic verification as a precondition to boot or update acceptance. Use of non-authorized binaries voids support and may disable the device.
⁷ Interoperability and Middleware. ROS 2/DDS interoperability (e.g., Fast DDS, Cyclone DDS) is validated only for enumerated versions and default QoS profiles; other versions, custom QoS, or alternate middlewares may require adaptation bridges and are outside conformance unless expressly certified in writing. Topic schemas are subject to evolution with semantic versioning; backward compatibility is a goal, not a guarantee.
⁸ SDKs and Reference Code. SDKs, examples, and reference drivers (including browser-based GUIs) are provided “as is,” for development and integration assistance only. They are not production commitments, and Olive assumes no duty to maintain API stability, ABI compatibility, or indefinite repository availability. Integrators must conduct independent cybersecurity review, static/dynamic analysis, and functional safety assessment.
⁹ IP and Confidentiality. All patents, patent applications, copyrights, design rights, trade secrets, trademarks, and mask works related to olixSense™ enclosures, PCBs, fusion algorithms, timing schemes, calibration processes, and manufacturing workflows are reserved. De-labeling, logo removal, or misrepresentation of origin is prohibited. Any non-public artifacts (e.g., private datasheets, test vectors, or beta firmware) are confidential information.
¹⁰ Safety-Critical Exclusions. Unless explicitly certified for a particular standard (e.g., IEC 61508, ISO 26262, DO-178/254), olixSense™ units are not designed for life-support, human-rated aerospace, or other safety-critical contexts where failure may cause personal injury, death, or catastrophic loss. The integrator bears sole responsibility for system-level hazard analysis, FMEA, functional safety architecture, and certification.
¹¹ Export Controls and Sanctions. Hardware, software, technical data, and cryptographic functionalities may be subject to EU, German, and—where applicable—U.S. export/sanctions regimes. Customer warrants compliance, including classification, licensing, end-use and end-user screening, and record retention. Olive disclaims responsibility for a buyer’s regulatory posture and may suspend deliveries for compliance reasons.
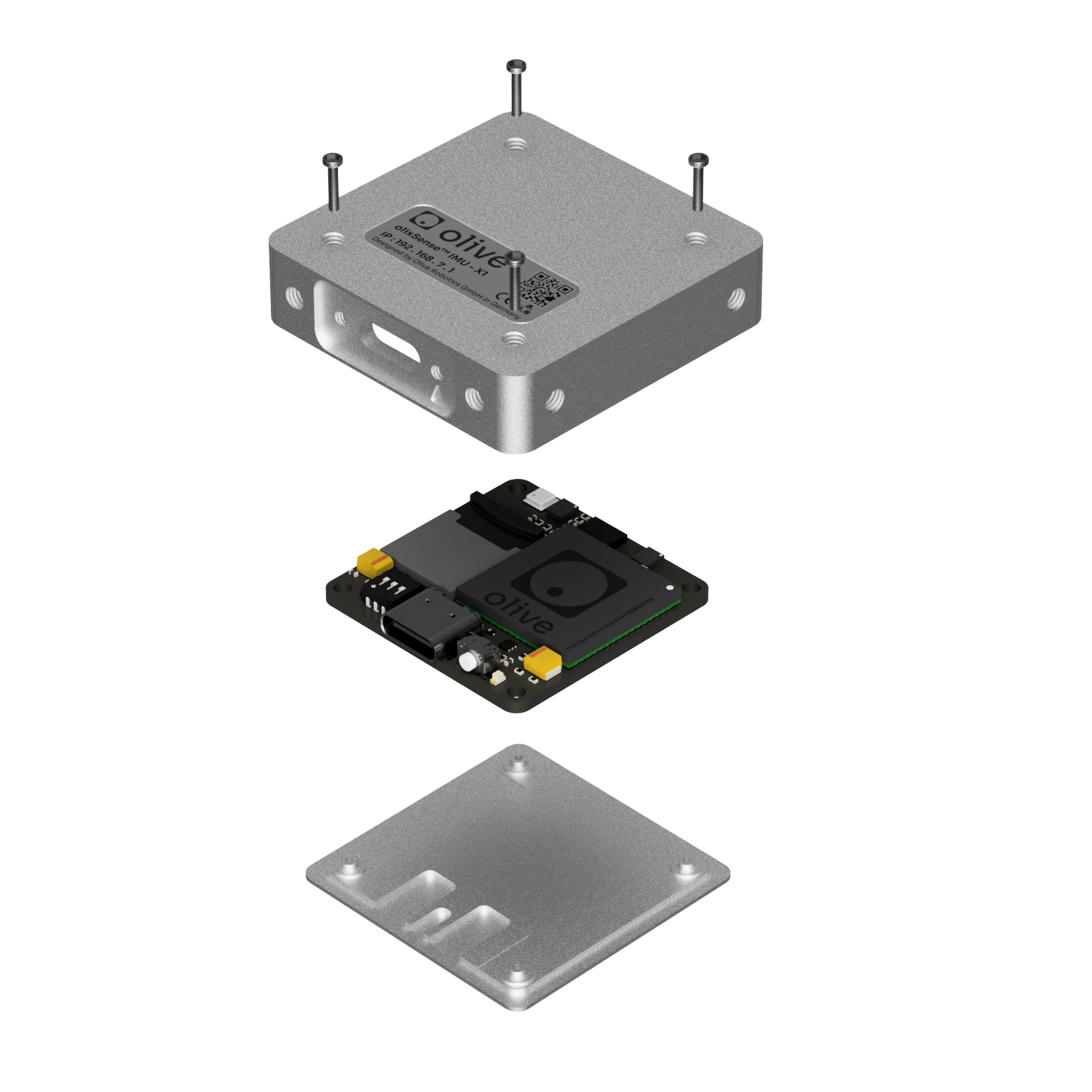
¹² Measurements, Tolerances, and BOM Variability. Physical dimensions, weights, torque specs, connector pinouts, and bill-of-materials line items are subject to normal manufacturing tolerances and supply-chain substitutions of equivalent form/fit/function components. Integrators must design mounting and harnessing with appropriate allowances and verify assemblies during incoming quality control.
¹³ Power, EMI/EMC, and Environment. Published power figures assume regulated inputs and compliant ground strategy. Ripple, ground loops, conducted emissions, or cable ingress can degrade timing and fusion accuracy. Environmental limits (temperature, vibration, humidity, dust, ingress) apply at the device boundary; external housings may be required to meet application-specific IP ratings or EMC directives.
¹⁴ Data, Logs, and Privacy. Diagnostic streams, timestamps, and calibration/state logs may be generated and stored locally for service, safety, and quality purposes. Customer is responsible for ensuring lawful processing of any personal or operational data captured in adjacent systems when using such logs for analytics, remote support, or fleet management.
¹⁵ Third-Party Dependencies and Marks. References to ROS, DDS, Linux, Arm®, TrustZone®, USB Type-C®, or other third-party technologies are descriptive only and imply no sponsorship, endorsement, or affiliation beyond documented licenses. All third-party marks are the property of their respective owners.
¹⁶ Commercial Terms; Availability. Quotations, lead times, and service-level statements are indicative and not binding until accepted by Olive in writing. Ship-dates are subject to component supply, regulatory screening, and force-majeure events. Olive may allocate constrained inventory across customers at its reasonable discretion.
¹⁷ Field Returns and Forensics. RMA acceptance is conditioned on adherence to Olive’s diagnostic triage, firmware provenance verification, and physical inspection protocols. Devices showing unauthorized modification, tampering, or operation outside published limits may be returned unrepaired or subject to fee-based service.
¹⁸ Limited Warranty; Exclusive Remedies. Subject to Olive’s standard Terms of Sale, Olive warrants only that new olixSense™ units will be free from defects in materials and workmanship under normal use for the stated warranty period. THE SOLE AND EXCLUSIVE REMEDY SHALL BE REPAIR, REPLACEMENT, OR REFUND (AT OLIVE’S ELECTION). TO THE MAXIMUM EXTENT PERMITTED BY LAW, ALL OTHER WARRANTIES—EXPRESS, IMPLIED, OR STATUTORY (INCLUDING MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, AND NON-INFRINGEMENT)—ARE DISCLAIMED.
¹⁹ Damage Limitation. EXCEPT FOR LIABILITY THAT CANNOT BE LIMITED BY LAW (E.G., PERSONAL INJURY CAUSED BY OLIVE’S GROSS NEGLIGENCE OR WILLFUL MISCONDUCT), OLIVE SHALL NOT BE LIABLE FOR INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING LOST PROFITS, BUSINESS INTERRUPTION, OR DATA LOSS), NOR FOR COSTS OF SUBSTITUTE GOODS OR SERVICES, ARISING FROM OR RELATED TO THE PURCHASE, USE, INTEGRATION, OR INABILITY TO USE OLIXSENSE™ PRODUCTS, SOFTWARE, OR DOCUMENTATION.
²⁰ Governing Law and Venue. All disputes arising out of or in connection with olixSense™ products or related materials shall be governed by the laws of the Federal Republic of Germany, without regard to conflict-of-laws principles. Exclusive venue shall be the courts of Munich, Germany; Olive reserves the right to seek injunctive or equitable relief in any competent jurisdiction to protect its intellectual property.
²¹ Updates to this Notice. Olive may amend this series-specific notice at any time. Continued access to materials, SDKs, or shipments following publication of revisions constitutes acceptance of the amended terms.