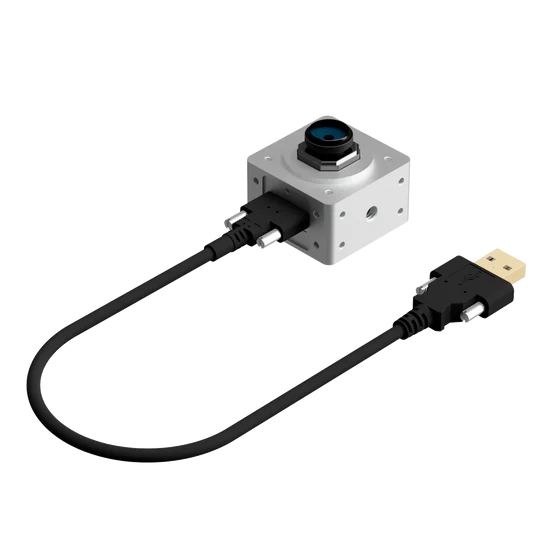

Instant Connection. Zero Setup.
Ethernet over USB means your V1 is ready the moment you plug it in — no drivers, no waiting, just data flowing.

Fast. Stable. Effortless.
Enjoy rock-solid performance over cables up to 2.5 meters, delivering high-speed data with ultra-low latency.

One System. Many Sensors.
Seamlessly integrate multiple V1 units into a single setup — scalable sensing without the complexity.


Aerial Robotics & UAVs
Precision motion intelligence for flight-critical systems.

Autonomous Mobile Robots (AMRs & AGVs)
Deterministic sensing for smooth, reliable navigation.

Marine & Surface Vehicles
Robust orientation and motion awareness beyond GPS.

Mobile Manipulation & Service Robotics
Coordinated perception for robots that move and act.

Human Motion & Wearables
High-frequency motion tracking with intelligence at the edge.

Agriculture & Field Robotics
Rugged sensing for autonomy in the wild.

Last-Mile & Urban Delivery Robots
Reliable perception for complex, shared environments.

Legged & Dynamic Robots
Deterministic motion sensing for high-impact dynamics.